An exploration of torque and rotary motion in biomechanics and kinesiology, and how we apply these principles effectively in our practice.
Torque is an important biomechanical concept, but also one of the most frequently misunderstood. Routinely I hear massage therapists talk about the adverse effects of torque on some soft-tissue structure. I can even remember a teacher in massage school repeatedly emphasizing how bad it was to stand with your rear foot turned out in a forward stance because this would ‘torque your psoas.’ In this issue we’ll take a deeper look at torque and how we apply its principles effectively in our practice.
Torque is sometimes defined simply as a twisting force. However, that definition is not complete enough. In physics it is defined as the rate of change of angular momentum of an object. That can seem a little complicated, so let’s take a deeper dive and see what this means when applying it to biomechanics and kinesiology.
If a force is applied to an object in a linear direction and that object is not fixed at any point, the resultant movement of the object will be in the same linear direction as the force. For example, if you push a book across a desk, the book slides in the same direction as your hand (this is assuming that you are applying pressure close to the center of the book and not toward one of its edges). This type of motion is referred to as linear motion. Linear motion occurs from pushing or pulling forces.
There is another type of motion in the body called rotary motion. Rotary motion occurs when a force is applied to one section of an object, and another section (such as the other end) remains fixed. In the body, this happens when a muscle pulls on one end of the bone and the other end is fixed (held still). The result is movement of the non-fixed end. For example, when the proximal end of the hamstring muscles are held stationary at the pelvis and the distal end pull on the tibia and fibula, there is rotary motion at the knee joint (flexion).
Torque is a force that is produced by rotary motion. The amount of torque force can vary depending on several different factors. A simple example involves a long handle wrench and a short handle wrench. Supposing you have a bolt that is on very tight and you are trying to loosen it. The long handle wrench is much more effective in loosening it. The long handle wrench is more effective because it can generate more torque. The reason why it generates more torque is described with a relatively simple equation we’ll look at next.
In the above example, the bolt is considered the axis of rotation. The axis of rotation is like the axle of a wheel. It is the central point around which the wheel rotates. The force applied to the wrench by your hand is called the applied force and the distance between your hand (applied force) and the axis of rotation is referred to as the lever arm (Figure 1). The lever arm is also called the force arm, moment arm, or torque arm. The greater is the length of the lever arm, the more force it can generate. This principle is illustrated in the equation: T=F(d) and if you are a little rusty on your math, that means Torque equals Force times Distance.
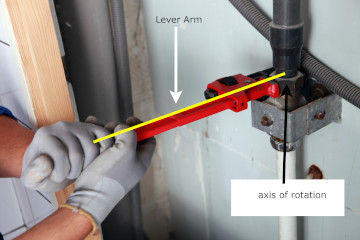
Figure 1
Lever arm and axis of rotation
In this equation T is the torque which can be generated, F is the applied force and d is the distance from the axis of rotation to the point of the applied force. An important point mentioned above and illustrated in the equation is that the longer is the distance (d) the greater is the torque that can be generated.
So how does this information translate into something meaningful when looking at function of the body? Specialists in biomechanics have gone to great lengths to examine how torque forces play a part in the normal and pathological function of the body. One example of how this information is useful comes from analyzing forces required to produce a shoulder injury.
Suppose Robert is holding his arm out in front of him in 900 of shoulder flexion. He suddenly has to catch a heavy load that is falling off a shelf above him. If he catches that load close to his shoulder the lever arm will be relatively short and the torque force won’t be as strong (point A in Figure 2). If instead, he catches the load near his hands with his arms fully extended, the lever arm for absorbing the load is much greater (point B in Figure 2). In either event, the shoulder muscles will be responsible for absorbing the force of the load he caught. However, in the second example, the torque force load on his shoulder is much greater because the lever arm is much longer, even though the weight he caught was the same in both examples (Figure 2). Consequently, the shoulder injury in the second scenario is likely to be significantly worse as the torque force from the load is much more.
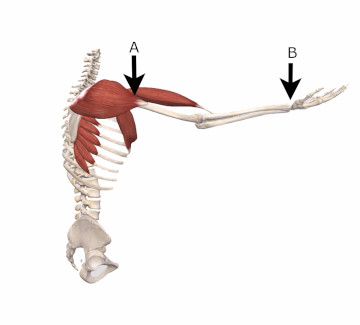
Figure 2
Absorbing load with different length lever arm.
We can apply this same principle of the lever arm to the process of assessment or treatment. If we are attempting to evaluate a shoulder injury with a resisted abduction movement, the client’s effort will have to be much greater if the therapist resists the client’s movement by pressing down at their wrist compared to resisting the abduction above their elbow in the upper arm. If you resist the movement at the client’s wrist, much less effort is required by the practitioner. However, if you resist the movement above the elbow at the upper arm, the client does not have to exert as much effort. Each situation has its advantages and disadvantages, but understating the difference in torque force required helps you choose the most appropriate strategy.
Biomechanics plays a fundamental role in clinical orthopedic massage and is much more useful when its concepts are correctly and accurately applied. There are numerous applications of appropriate torque concepts for injury assessment, treatment strategies, stretching positions, or good home care suggestions after treatment.